Die umfassende Erforschung des Mars z?hlt zu den wichtigsten Zielen der internationalen Raumfahrt in den kommenden Jahrzehnten. Um Menschen dabei nicht in Gefahr zu bringen, sollen Roboter eine Vielzahl von Aufgaben übernehmen. Damit deren Einsatz in der fremden Umgebung getestet und das Zusammenspiel von weitgehend autonomen Roboterschw?rmen realistisch simuliert werden kann, haben Wissenschaftlerinnen und Wissenschaftler des Technologie-Zentrums Informatik und Informationstechnik (TZI) der Universit?t Bremen unter Leitung von Professor Gabriel Zachmann jetzt ein virtuelles Testumfeld entwickelt. Rund 40 Quadratkilometer des Canyon-Systems ?Valles Marineris“ auf dem Mars stehen nun für die Vorbereitung künftiger Missionen in der virtuellen Realit?t (VR) zur Verfügung.
Suche nach Rohstoffen und extraterrestrischem Leben
Im Rahmen des Projekts VaMEx-VTB (?Valles Marineris Explorer - Virtual TestBed“) hat die Arbeitsgruppe von Professor Zachmann die ?Mariner-T?ler“ auf der Basis von Scans der NASA nachgebildet. ?Die Region wurde ausgew?hlt, weil dort Rohstoffe vermutet werden, die für sp?tere bemannte Missionen und menschliche Siedlungen auf dem Planeten nützlich w?ren“, sagt Professor Zachmann. Darüber hinaus bestehe die M?glichkeit, Hinweise auf extraterrestrisches Leben zu finden, denn die Bedingungen für die Entstehung von Mikroorganismen k?nnten zumindest in der Vergangenheit – als der Mars klimatisch noch weniger lebensfeindlich war – gut gewesen sein.
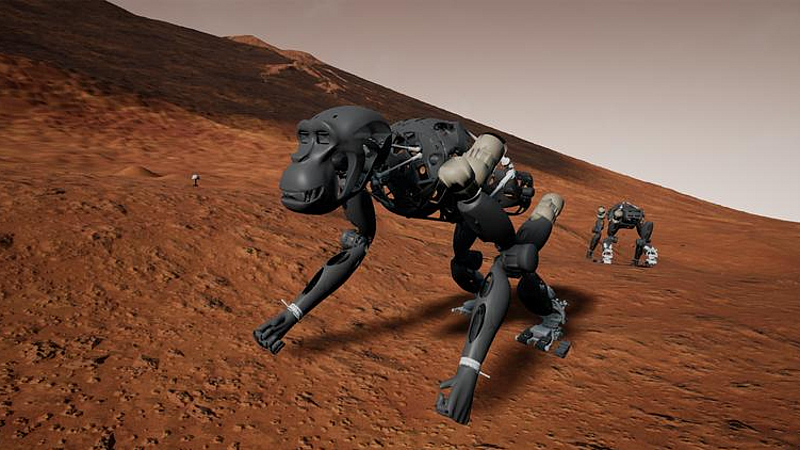
Weil das Terrain in den Canyons sehr vielf?ltig ist, werden für die Erkundung auch Roboter mit unterschiedlichen St?rken ben?tigt – einige k?nnen beispielsweise klettern, andere fliegen oder Nutzlasten transportieren. Zus?tzlich muss ein Netzwerk aus kleinen, funkbasierten ?Leuchttürmen“ (?Beacons“) errichtet werden, damit die Roboter jederzeit ihre Position bestimmen k?nnen.
Hohe Anforderungen an die Software
Die TZI-Software erm?glicht es, das komplexe Zusammenspiel zwischen den Robotern unter Berücksichtigung aller Besonderheiten des Planeten – beispielsweise Schwerkraft, Bodenbeschaffenheit und extreme Temperaturen – zu simulieren. ?Dafür mussten zun?chst enorme Datenmengen verarbeitet werden, damit eine realistische, dreidimensionale Darstellung der Landschaft entsteht“, so Zachmann. Eine Herausforderung lag auch in der Anbindung der unterschiedlichen Roboter-Softwaresysteme, damit der Austausch von Informationen m?glich wird.
Das System hat sich bereits bei den ersten Tests bew?hrt. Die Forschenden haben bemerkt, dass Roboter auf dem Mars andere Algorithmen ben?tigen als auf der Erde, um ihre Position bestimmen zu k?nnen. Dies liegt unter anderem an den sehr eint?nigen Farben des Gel?ndes, die es schwierig machen, landschaftliche Wiedererkennungsmerkmale zu identifizieren. Genau in derartigen Erkenntnissen liegt der gr??te Nutzen der Simulation: Fehler k?nnen behoben werden, bevor die Roboter eines Tages ihre achtmonatige Reise zum Mars antreten. Die Chance, dass vor Ort dann alles funktioniert wie geplant, steigt erheblich.
Bundesweite Kooperation
Das Projekt VaMEx-VTB wurde vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) mit Mitteln des Bundesministeriums für Wirtschaft und Energie (BMWi) gef?rdert. Als Auftragnehmer der Universit?t Bremen waren dabei: das Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI GmbH, Bremen), Universit?t der Bundeswehr (München), TU München, TU Braunschweig, DLR Oberpfaffenhofen und Uni Würzburg.
Axel K?lling
澳门皇冠_皇冠足球比分-劲爆体育:
https://cgvr.informatik.uni-bremen.de/research/vamex-vtb/
www.uni-bremen.de/tzi/
www.uni-bremen.de
Fragen beantwortet:
Axel K?lling
?ffentlichkeitsarbeit
Technologie-Zentrum Informatik und Informationstechnik (TZI)
Universit?t Bremen
Tel.: 0171-5305119
E-Mail: axelprotect me ?!.koellingprotect me ?!uni-bremen
Universit?t Bremen
Hochschulkommunikation und -marketing
Telefon: +49 421 218-60150
E-Mail: presseprotect me ?!uni-bremenprotect me ?!.de